Tcp协议设备接入

一、开启TCP服务
TCP开启在application.yml文件中控制。
提示
tcp.enabled: 开启后, TCP服务器启动连接设备
openws: 开启后,配合TCP服务,推送设备消息至前端实时更新

二、TCP设备连接
1. 注册包:
由于TCP设备连接,需要识别设备,因此TCP客户端连接时,上报的第一个报文为客户端的注册包。
例如:7e80D4AD203F3A1C7e
其中 7e 是包头包尾
80是注册包的标识位
D4AD203F3A1C 是设备编号客户端上报注册包后,更新设备状态为在线
2. 心跳包:
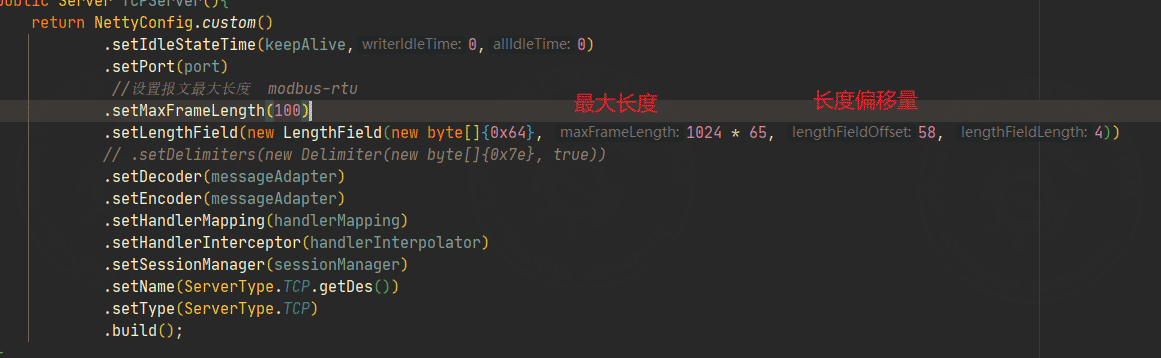
TCP需要主动发送消息来维持设备的心跳保持,上图中 keep-alive 是心跳超时的判定时间 70s,因此设备的心跳需要维持在70s以下。
心跳包例如: 7e817e 7e 是包头包尾,81是标识位 (心跳包只是维持TCP长连接,一般无其他实际意义)
3. 特殊的注册,心跳 数据包:
在有些设备客户端,会把设备的注册包,心跳包,数据包,定时上报,一方面是包含了设备编号,也可以维持了心跳,数据包还包含了设备上报的信息,这种情况系统也是可以支持的。
三、TCP模拟客户端测试
模拟客户端放在如下文件
1. 模拟客户端上线
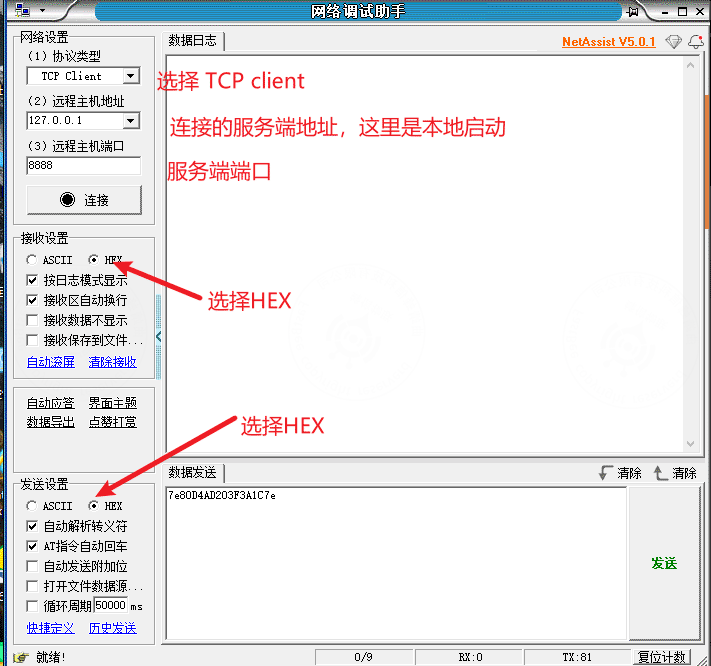
发送注册包:配置好后,点击链接,发送注册包,如下 7e80D4AD203F3A1C7e 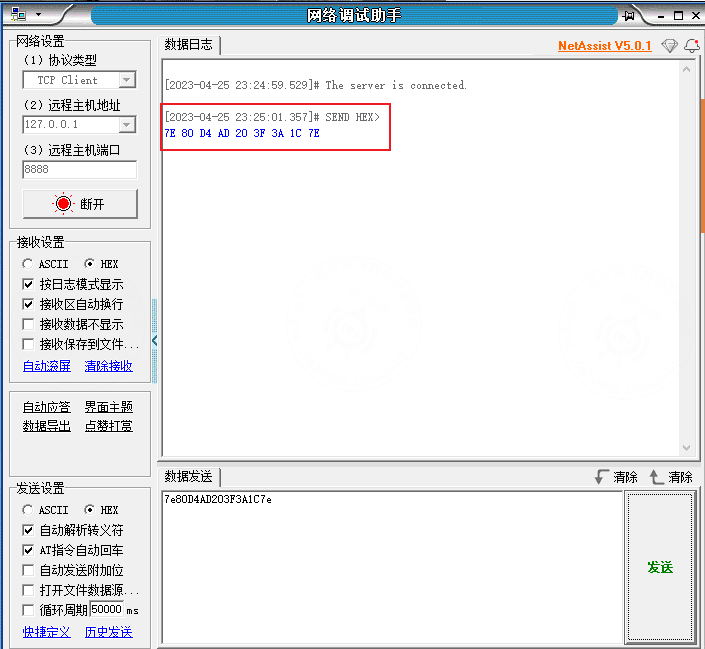
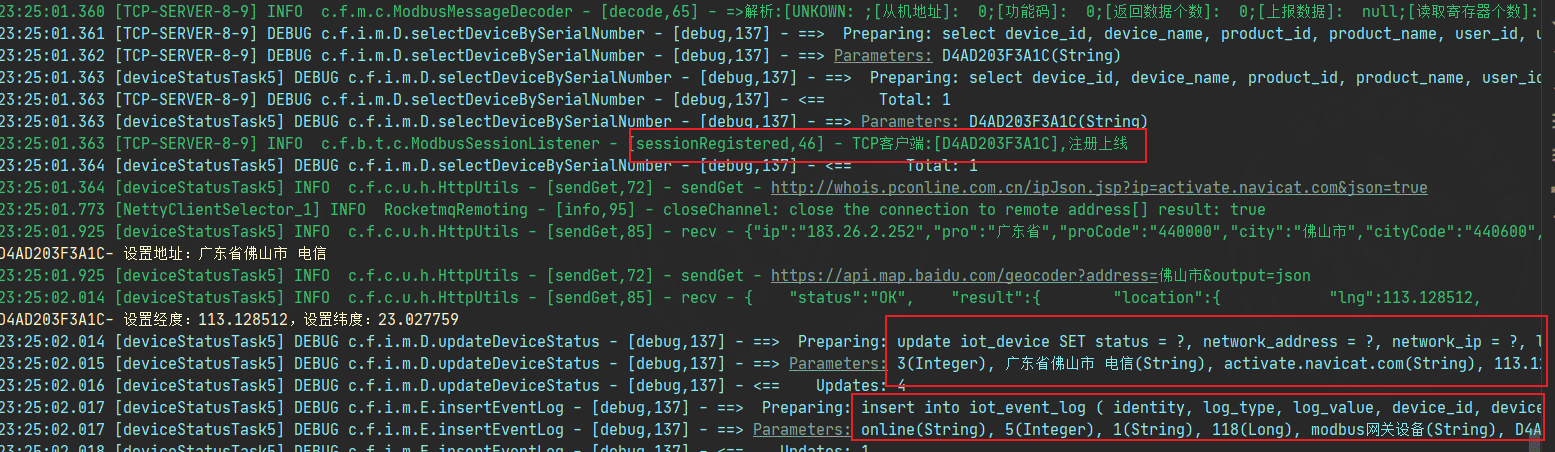
这个时候,看下本地启动服务可以看到
- a. TCP客户端上线
- b. 更新TCP客户的状态
- c. 记录设备事件记录
 查看前端页面展示: webSocket 推送设备上线消息,实时更新前端显示
查看前端页面展示: webSocket 推送设备上线消息,实时更新前端显示 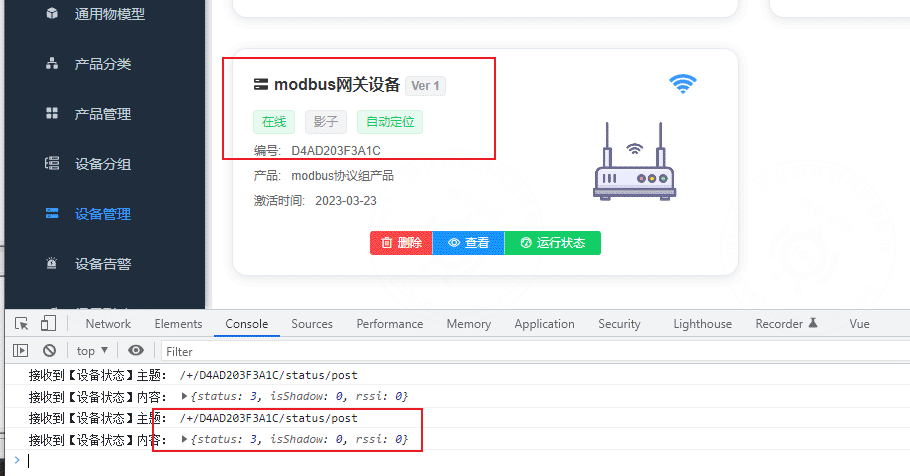
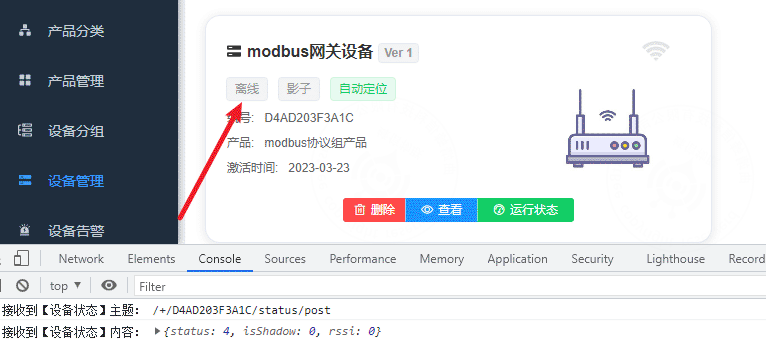
2. 模拟TCP客户端断电或 断开
断电需要等待设备心跳超时(70S), 断开连接是,是实时上报设备状态
断开连接是,打印信息如下,更新设备上下线状态,新增设备事件记录,前端ws推送实时更新

同样模拟客户端断电,需要等待客户端超过心跳超时时间 (70s),更新动作跟设备断开一致。
四、TCP客户端前端连接展示
新建产品,选择TCP传输协议,通讯协议可以选择 JSON,Modbus-rtu协议 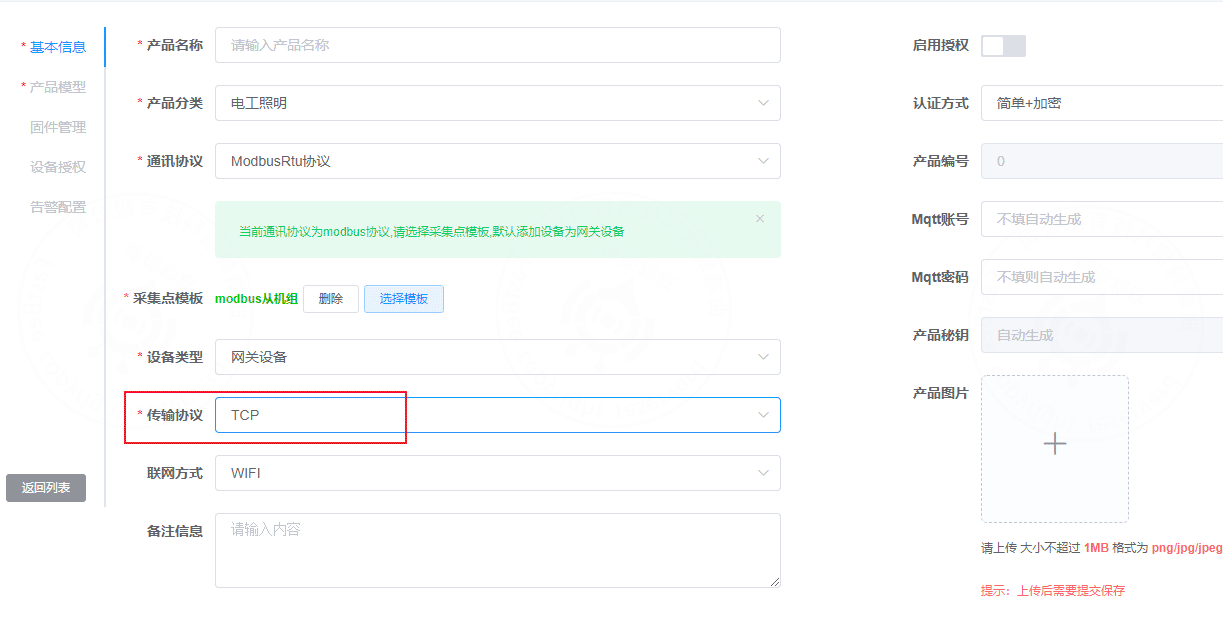
新建产品后,选中产品新建设备即可。
五、TCP + MODBUS
- 概述:Modbus TCP 报文由以下几个主要部分组成:
- MBAP 报文头(Modbus Application Protocol Header):
- 事务标识符(Transaction Identifier):用于匹配请求和响应,通常由客户端生成。
- 协议标识符(Protocol Identifier):固定为 0,表示 Modbus 协议。
- 长度(Length):后续数据的字节长度,包括单元标识符和 PDU (Protocol Data Unit)。
- 单元标识符(Unit Identifier):用于标识从站设备。
- PDU(Protocol Data Unit):
- 功能码(Function Code):指示要执行的操作,如读取、写入等。
- 数据(Data):根据功能码的不同,包含相应的操作数据。
使用:产品配置时选择Modbus Tcp协议,具体配置方式参考网关与子设备文档
可以在设备详情-数据调试、数据采集页面下发指令,如果采用云端轮询方式,可配置轮询任务下发指令:
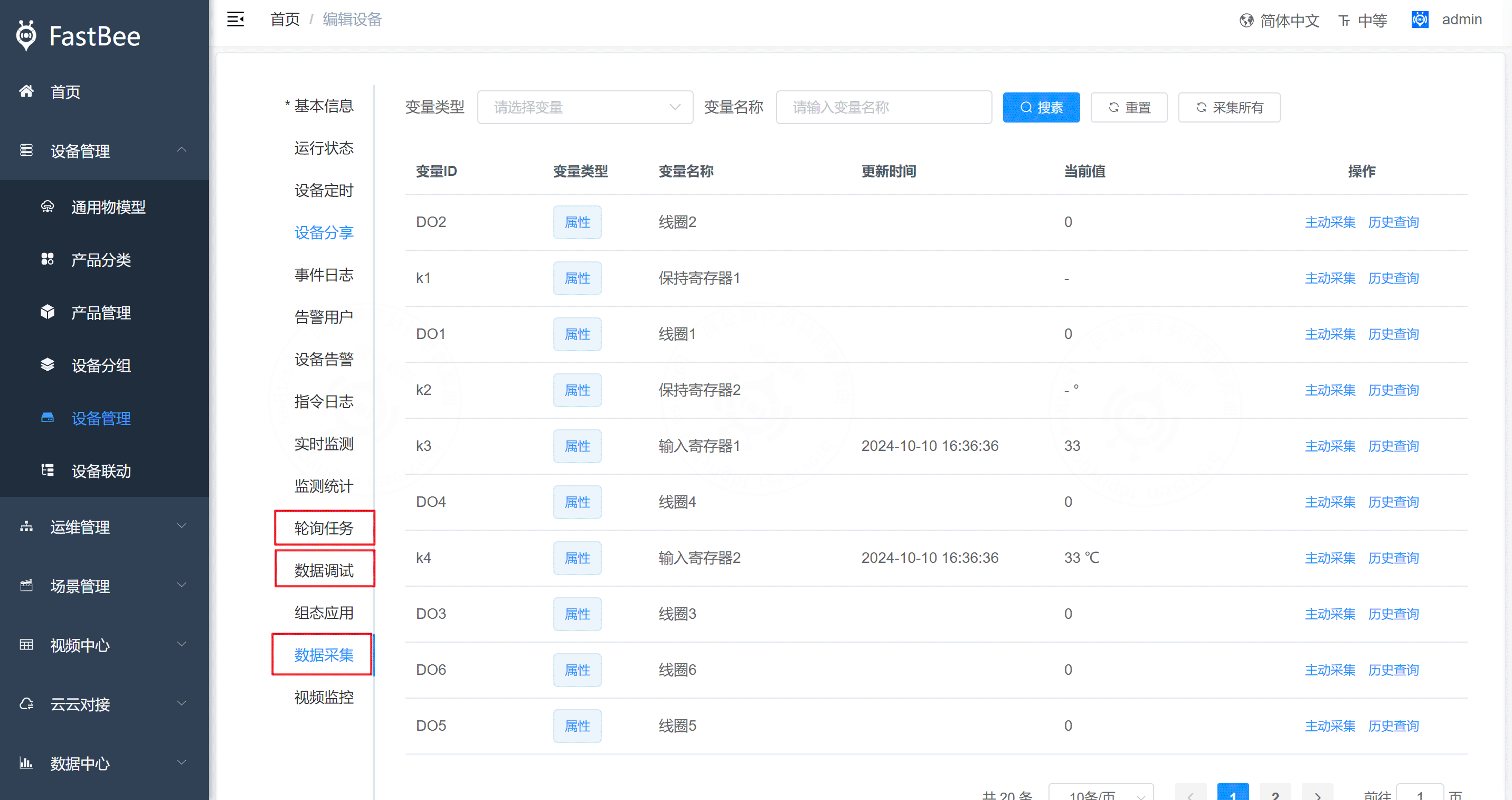
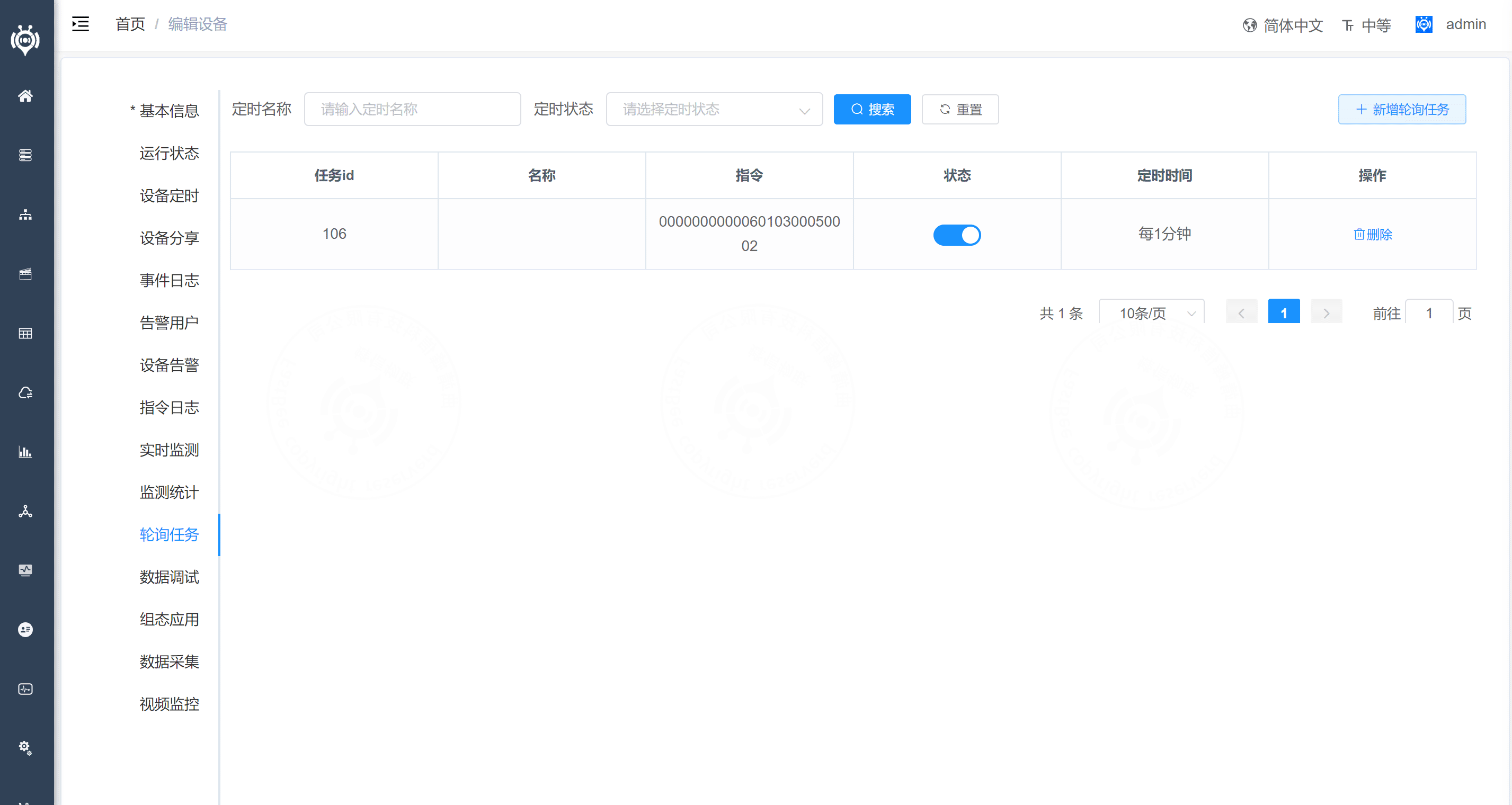
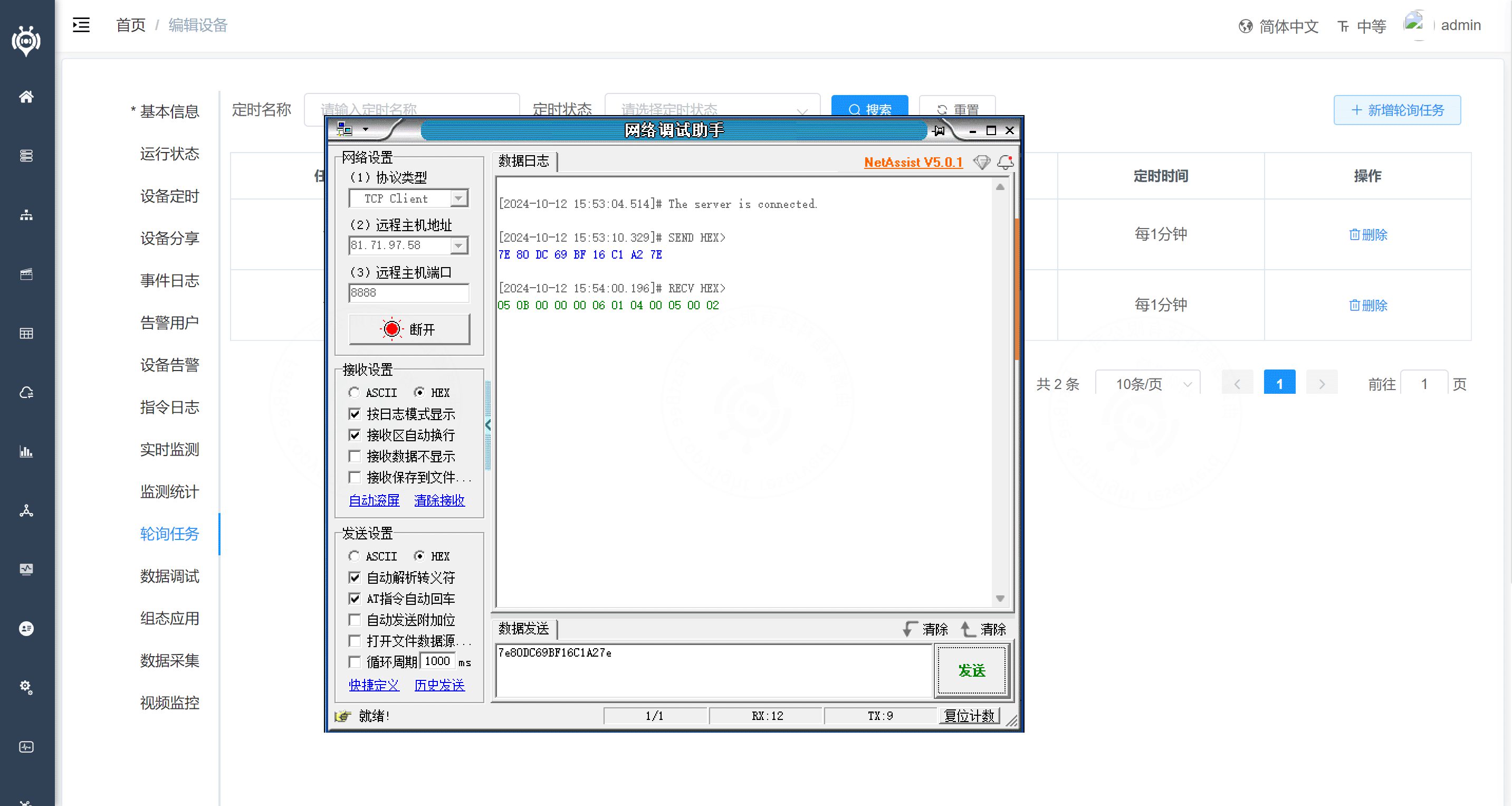
云端轮询,用模拟设备可以看到下发到设备的读指令,如下:
六、TCP+JSON
这里采用动态倾角监测仪(通讯协议)2023-3-1 103136 设备通讯协议进行演示。(应答机制)
详情
A. 设备监测数据报文
- 报文说明
动态倾角仪处于低功耗的时候、按照平台设定的采集间隔和发送间隔通讯、监测站每一个通讯间隔向平台发送一次监测数据,数据采用HTTP以POST方式发送、数据格式为标准的JSON键值对。如果平台在2倍间隔时没有收到监测数据、可判定为设备离线。
- 报文示例
{
"dev_ty":4000,
"pro_ty":"rf_epmt_qjdt_1105",
"use_id":0,
"dev_id":2302180001,
"pcb_ver":221214,
"bot_ver":2023021700,
"app_ver":2023030100,
"net_ty":1,
"link_ty":0,
"pak_ty":"up_data",
"mk_id":"",
"ka_id":"",
"rssi":0,
"snr":0,
"x_jsd":0.0492592602968216,
"y_jsd":0.0070370370522141457,
"z_jsd":4.4122223854064941,
"temp_c_val":14.195767402648926,
"x_jd":0.63720703125,
"y_jd":0.0933837890625,
"z_jd":89.3463134765625,
"cj_s":300,
"up_s":3600,
"xt_s":3600,
"run_s":70,
"in_v":0.00880800001323223,
"bat_v":6.4534401893615723,
"gn_wd":0,
"gn_jd":0,
"gn_hb":521,
"mem_sx":19276,
"tm_sm":"000101001046"
}- JSON键值说明
| 键名 | 数据类型 | 说明 | 备注 |
|---|---|---|---|
| dev_ty | U16 | 设备类型 | 厂家研发编码、用户无需在意 |
| pro_ty | String | 产品类型 | rf_epmt_qjdt_1105=动态倾角仪 |
| use_id | U16 | 用户ID | 厂家对用户的编码 |
| dev_id | U32 | 设备唯一ID | 设备厂家对设备的唯一编号 |
| pcb_ver | U32 | 电路板版本号 | 设备电路板版本号 |
| bot_ver | U32 | 启动程序版本 | 远程启动程序版本号 |
| app_ver | U32 | 功能程序版本 | 功能程序版本号 |
| net_ty | U8 | 网络类型 | 1=CAT1、5=NBIOT、6=RJ45、8=北斗短报文 |
| link_ty | U8 | 连接类型 | 0=短连接=设备发送完数据等待5秒主动断开连接、1=长连接=设备发送完毕数据不断开连接。 |
| pak_ty | String | 数据包类型 | "up_data"=上报监测数据 |
| mk_id | String | 无线模块号 | 模块号IMEI=15-20个字符串组成 |
| ka_id | String | 流量卡号 | 物联网卡号IMSI=15-20个字符串组成 |
| rssi | S16 | 信号强度 | 现场网络信号的强度 |
| snr | S16 | 信号质量 | 现场网络信号的质量 |
| x_jsd | float | X轴加速度 | 重力加速度、单位g |
| y_jsd | float | Y轴加速度 | 重力加速度、单位g |
| z_jsd | float | Z轴加速度 | 重力加速度、单位g |
| temp_c_val | float | 温度 | 设备内部温度、单位℃ |
| x_jd | float | X轴角度 | 倾角度、单位° |
| y_jd | float | Y轴角度 | 倾角度、单位° |
| z_jd | float | Z轴角度 | 倾角度、单位° |
| cj_s | U32 | 采集数据间隔 | 设备每cj_s秒采集并和阈值对比一次传感器数据 |
| up_s | U32 | 上报数据间隔 | 设备每到up_s秒向平台发送一次数据报文、平台收到以后尽快向设备回馈报文、超过2倍up_s时间没有收到平台回馈,设备会重启当前连接。 |
| xt_s | U32 | 设备心跳数据 | 预留键值对、暂时未使用 |
| run_s | U32 | 设备运行时间 | 设备从上电到现在的工作时间、单位秒 |
| in_v | float | 太阳能或输入电压 | 太阳能或市电AC-DC适配器输入的电压 |
| bat_v | float | 蓄电池电压 | 蓄电池电压 |
| gn_wd | float | 定位纬度 | GNSS当前定位-纬度 |
| gn_jd | float | 定位经度 | GNSS当前定位-经度 |
| gn_hb | float | 定位海拔 | GNSS当前定位-海拔高度 |
| mem_sx | U32 | 剩余内存 | 设备操作系统的剩余内存 |
| err_cd | U16 | 错误代码 | 当前设备的错误代码0=无错误、其它的参考后面的错误代码定义 |
| tm_sm | / | / | 预留键值对、暂时未使用 |
B、平台回馈报文
- 报文说明
平台收到倾角仪的监测数据以后、需尽快通过SET报文,向倾角仪发送参数设置信息。考虑信号不好的网络延迟和平台服务响应时间在内、如果在10秒内没有收到平台的ACK回馈,倾角仪在预定的重传次数内(固定为5次)、向平台重传数据保证通讯的可靠性。
- 报文示例
{
"pak_ty":"set_inf",
"cj_s":null,
"up_s":3600,
"xt_s":3600,
"x_yz":500,
"y_yz":500,
"z_yz":500,
"nian":2022,
"yue":3,
"ri":25,
"shi":12,
"fen":23,"miao":33
}- JSON键值说明
| 键名 | 数据类型 | 说明 | 备注 |
|---|---|---|---|
| pack_ty | String | 数据包类型 | "set_inf"=设置报文 |
| cj_s | U32 | 数据采集间隔 | 平台设置设备的数据采集间隔 |
| up_s | U32 | 上报数据间隔 | 平台设置设备的数据上报间隔 |
| xt_s | U32 | 设备心跳间隔 | 平台设置设置的心跳上报间隔、默认不使用 |
| x_yz | Float | X轴增量阈值 | 设置X轴的增量阈值,1.2为±1.2的变动 |
| y_yz | Float | Y轴增量阈值 | 设置Y轴的增量阈值,1.2为±1.2的变动 |
| z_yz | Float | X轴增量阈值 | 设置Z轴的增量阈值,1.2为±1.2的变动 |
| nian | U8 | 下发同步=年 | 平台下发设备同步时间=年=2022=22 |
| yue | U8 | 下发同步=月 | |
| ri | U8 | 下发同步=日 | |
| shi | U8 | 下发同步=时 | |
| fen | U8 | 下发同步=分 | |
| miao | U8 | 下发同步=秒 | |
| err_cd | U16 | 错误代码 | 错误代码0=无错误、其它的参考后面的错误代码定义 |
设备上报报文: (设备数据,注册包,心跳包组合)
{
"dev_ty":4000,
"pro_ty":"rf_epmt_qjdt_1105",
"use_id":0,
"dev_id":2302180001,
"pcb_ver":221214,
"bot_ver":2023021700,
"app_ver":2023030100,
"net_ty":1,
"link_ty":0,
"pak_ty":"up_data",
"mk_id":"",
"ka_id":"",
"rssi":0,
"snr":0,
"x_jsd":0.0492592602968216,
"y_jsd":0.0070370370522141457,
"z_jsd":4.4122223854064941,
"temp_c_val":14.195767402648926,
"x_jd":0.63720703125,
"y_jd":0.0933837890625,
"z_jd":89.3463134765625,
"cj_s":300,
"up_s":3600,
"xt_s":3600,
"run_s":70,
"in_v":0.00880800001323223,
"bat_v":6.4534401893615723,
"gn_wd":0,
"gn_jd":0,
"gn_hb":521,
"mem_sx":19276,
"tm_sm":"000101001046"
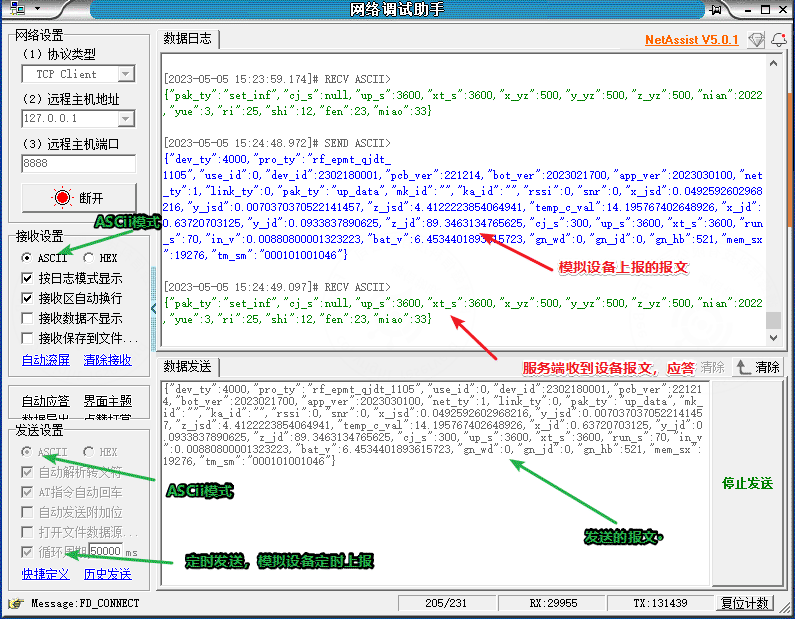
}服务端收到设备上报消息,应答设备:
{
"pak_ty":"set_inf",
"cj_s":null,
"up_s":3600,
"xt_s":3600,
"x_yz":500,
"y_yz":500,
"z_yz":500,
"nian":2022,
"yue":3,
"ri":25,
"shi":12,
"fen":23,
"miao":33
}模拟TCP客户端示例:
七、TCP客户端指令下发
如下图所示:
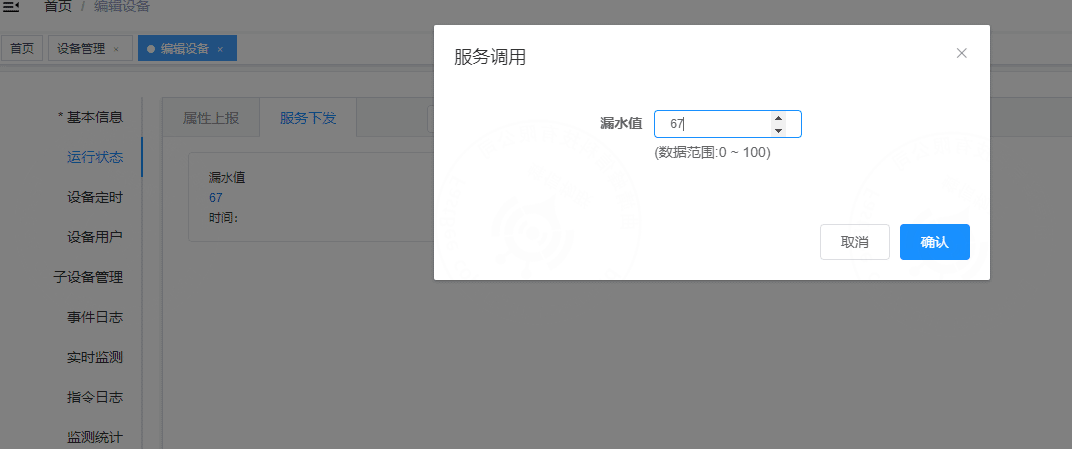
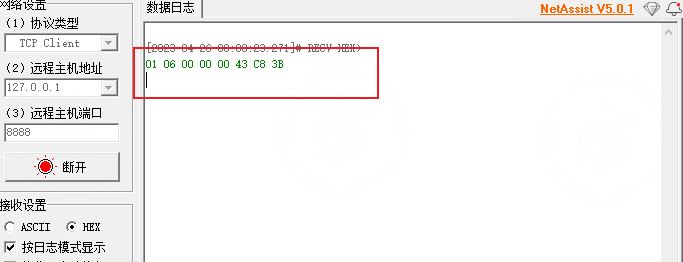
查看模拟模拟客户端可以看到,写指令下发成功,如下图所示:
八、TCP数据包,粘包,分包处理
TCP粘包拆包发生场景
- 因为TCP是面向流,没有边界,而操作系统在发送TCP数据时,会通过缓冲区来进行优化,例如缓冲区为1024个字节大小。
- 如果一次请求发送的数据量比较小,没达到缓冲区大小,TCP则会将多个请求合并为同一个请求进行发送,这就形成了粘包问题。
- 如果一次请求发送的数据量比较大,超过了缓冲区大小,TCP就会将其拆分为多次发送,这就是拆包。
对于粘包和拆包问题,常见的解决方案有四种:
- 发送端将每个包都封装成固定的长度,比如100字节大小。如果不足100字节可通过补0或空等进行填充到指定长度;
- 发送端在每个包的末尾使用固定的分隔符,例如\r\n。如果发生拆包需等待多个包发送过来之后再找到其中的\r\n进行合并;例如,FTP协议;
- 将消息分为头部和消息体,头部中保存整个消息的长度,只有读取到足够长度的消息之后才算是读到了一个完整的消息;
- 通过自定义协议进行粘包和拆包的处理
Netty对粘包和拆包问题的处理
Netty对解决粘包和拆包的方案做了抽象,提供了一些解码器(Decoder)来解决粘包和拆包的问题。如:
- LineBasedFrameDecoder:以行为单位进行数据包的解码;
- DelimiterBasedFrameDecoder:以特殊的符号作为分隔来进行数据包的解码;
- FixedLengthFrameDecoder:以固定长度进行数据包的解码;
- LenghtFieldBasedFrameDecode:适用于消息头包含消息长度的协议(最常用);
FastBee的TCP服务端,解决粘包,分包问题
固定分隔符
DelimiterBasedFrameDecoder 类定义了分割符处理粘包,分包问题
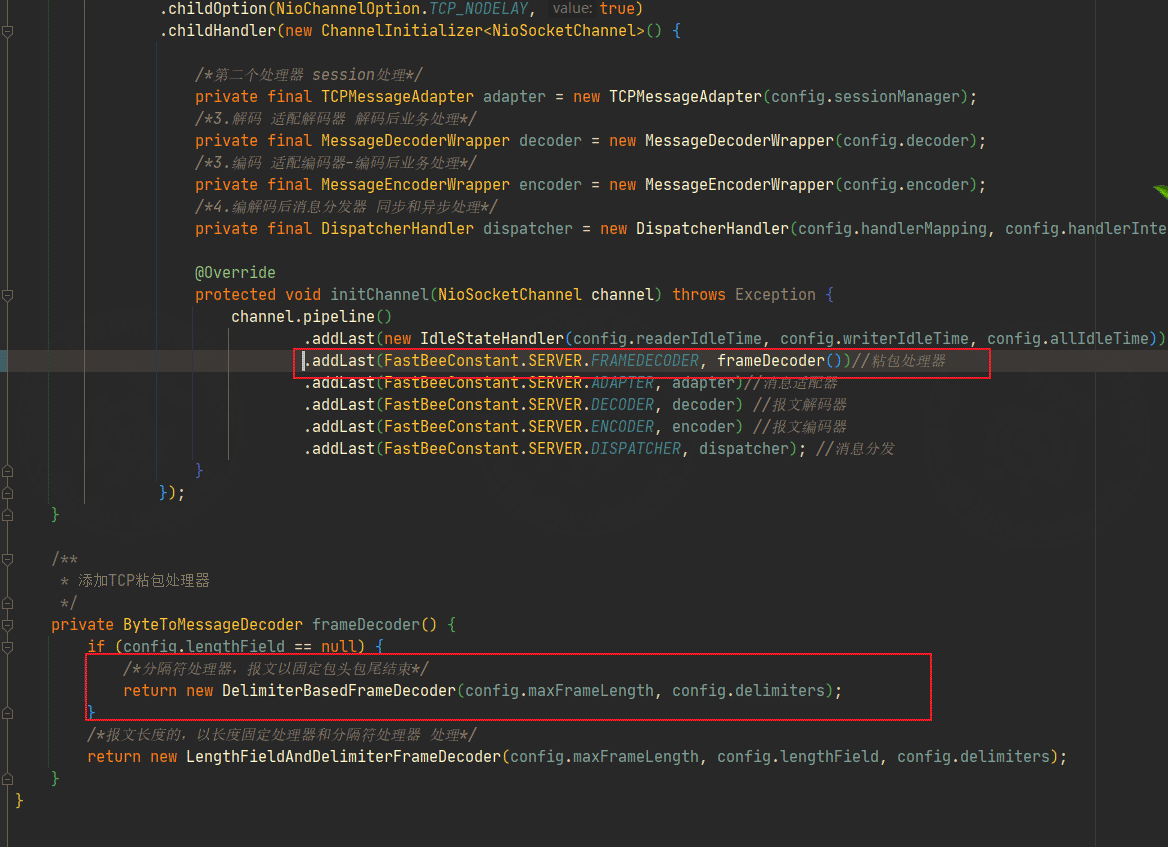
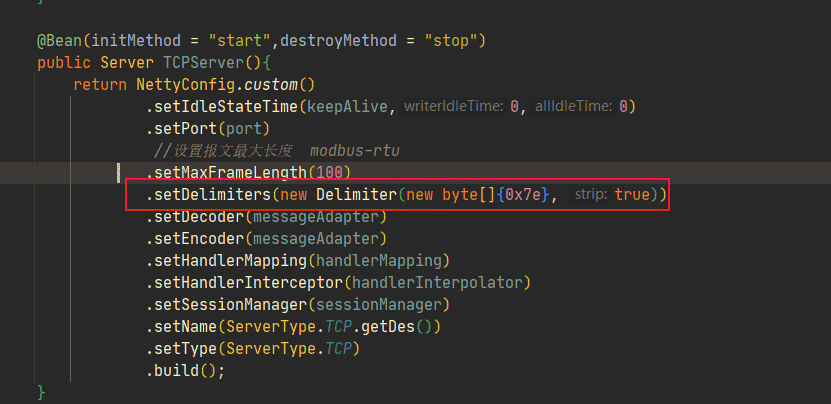
TCP服务器启动处理客户端消息配置中,第二个处理类配置了粘包,分包处理在TCP启动时候,添加分隔符号
固定长度
LengthFieldAndDelimiterFrameDecoder ,固定长度配置在TCP启动时候,配置如下做固定长度处理粘包,分包问题